2024. 01. 02. - 09:40
Megérkezett a természetesebb robot lábvezérlés

A robotizált lábprotéziseket használó emberek zökkenőmentesebb élménye a célja a Michigani Egyetem új projektjének.
Természetesebb hatású robot-lábvezérlést fejlesztenek a kutatók. A Michigani Egyetem projektje azzal a céllal indult el, hogy a robotizált lábprotéziseket használók zökkenőmentesebben alkalmazzák robot végtagjaikat.
A projekt új támogatást is kapott az Országos Egészségügyi Intézettől Amerikában. A 3 millió dolláros R01 támogatás lehetővé teszi, hogy a kutatók megvalósítsák a továbbfejlesztett vezérlési programot egy kereskedelmi forgalomban kapható robotprotézis lábon.
Egy átlagos ember számára az ülés, állás, járás, fel- és lemenetel a lépcsőn nem okoz problémát.
A robotok számára azonban nehézkesek ezek az átmenetek - a robotprotézis lábaknak további kihívást jelent, hogy nem kapcsolódnak be az emberi felhasználó központi idegrendszerébe, mellyel szinkronban maradnának a testükkel.
Robert Gregg, a robotika docense 2013 óta dolgozik ezen a problémán vezető kutatóként. Korai sikert könyvelhetett el a térd- és bokaízületek helyzetének szabályozásában, egy olyan modellen keresztül, amely folyamatosan reprezentálja a járásciklus minden szakaszát.
Megérkezett a természetesebb robot lábvezérlés
Korábban a robotprotézis lábak külön vezérlőket használtak a járásciklus minden szakaszához, például a sarok talajhoz ütéséhez, a kilökéshez és a lendítéshez. Ennek eredményeként az egyes modellek kontrollparamétereit és az egyik modellről a másikra való váltás szabályait minden egyes páciensre optimalizálni kellett.
„Minden embernek más paraméterei vannak, ugyanis minden ember másképp jár. Ez pedig rendkívül körülményes klinikai alkalmazást eredményezett” – mondta Gregg.
Ugyanakkor, a comb mozgásának felhasználása az ízületi pozíció előrejelzésére - folyamatos modellel -, igen jó módszernek bizonyult a természetes járás kialakítására.
A 2018-as kezdeti R01 támogatással Gregg csapata kiterjesztette a sétavezérlési modellt más fontos forgatókönyvekre is: emelkedőkre, lépcsőkre, ülésből állásra, felállásra a járáshoz. A vizsgálatban résztvevők ezeket a tevékenységeket tipikusabb biomechanikával végezhették el a robotláb használatával, mint a passzív protézisekkel. A vezérlési algoritmus kötési szögekhez rögzítése azonban merevebb tapasztalatokhoz vezet a tevékenységek megváltoztatásakor.
„A robot nagyon erős motorokkal rendelkezik, így ha a páciens irányítja a pozícióját és az valahogy nem kompatibilis a környezettel, nagyon merevnek érezheti magát, ráadásul ez fájdalmat jelenthet az amputáltak számára, ott, ahol a végtag találkozik az aljzattal” – magyarázta Gregg.
A szakértő csapata most az ízületi pozíció közvetett szabályozását vizsgálja – ehelyett a biomechanikai impedanciát utánozva – a folyamatos modellezési keretrendszer segítségével.
Impedancia megközelítés esetén egyensúlyi helyzet áll fenn, az erők úgy vannak beállítva, hogy finoman visszahúzzák a csuklót ebbe a helyzetbe, amennyiben megzavarják. Ez némi mozgásteret biztosít.
Gregg egy autó felfüggesztéséhez hasonlítja a helyzetet. Ennek lehetővé kell tennie, hogy a láb ugyanazt a képességet kínálja és zökkenőmentesen mozogjon egyik tevékenységről a másikra, miközben kényelmesebb haladást is biztosít.
A láb programozása két biológiai lábbal rendelkező ember biomechanikai mérésén alapul, hogy megismételje azt a mozgást, amelyre a csípő és a hát van „tervezve”. A passzív lábprotézis használói gyakran tapasztalnak fájdalmat a csípőben, a háton és az organikus térdben, mivel kompenzálniuk kell a műláb önsúlyát.
Hogy megtudja, hogyan kell a lábnak viselkednie a tevékenységek során, Gregg Elliott Rouse munkatársával működött együtt, aki az egészséges emberi járás mechanikai tulajdonságait tanulmányozza.
„A méréseket a láb biomechanikai tulajdonságainak meghatározásához egy exocsontváz segítségével kapjuk meg – mondta el Rouse, robotika és a gépészmérnök docens, a projekt társkutatója. - Az exoskeleton többnyire nem nyújt segítséget, de időnként gyors perturbációt alkalmaz, amely elmozdítja a végtagot. Ezekből a mérésekből meghatározhatjuk a mechanikai impedanciát, beleértve az olyan tulajdonságokat, mint a merevség, viszkozitás és tehetetlenség.”
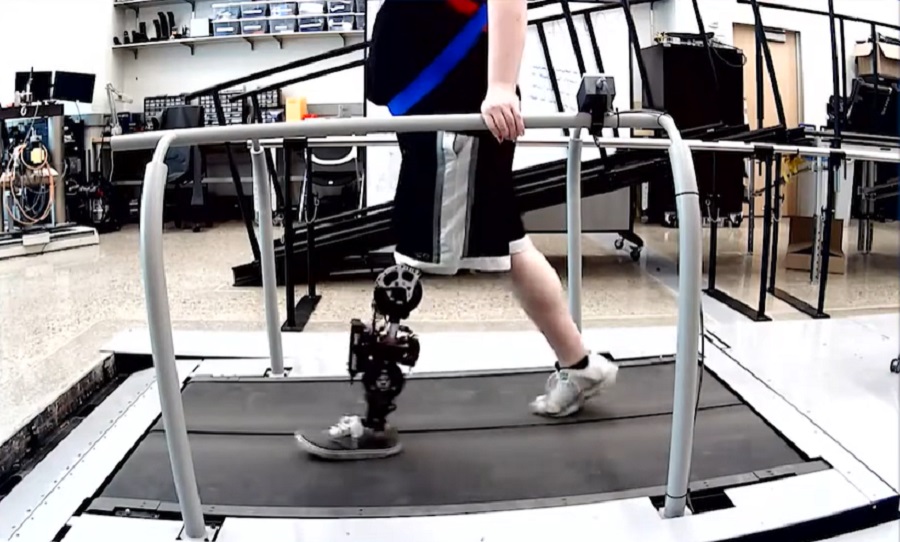
A vezérlőprogramokat először azon a robotlábon fogják tesztelni, amelyet Gregg csapata házon belül épített, motorokkal - utóbbiak a bokát és a térdet is hajtják. Ezután a csapat az Ossür Power Knee lábprotézisén teszteli őket, hogy lássák, készen állnak-e az új algoritmusok az emberek segítésére.
Amellett, hogy méri a vizsgálatban résztvevők biomechanikáját - lábprotézissel járás közben -, a kutatócsapat formális visszajelzéseket is gyűjt, hogy számszerűsítse a kényelem növekedését és a fájdalom csökkenését.
A Power Knee rugós, passzív bokája kisebb mozgási tartománnyal rendelkezik, de könnyebb is, mint a laborláb – és ami a legfontosabb, most már segít az embereknek járni. Gregg csapata bízik abban, hogy képesek módosítani vezérlési modelljüket, hogy dolgozzanak rajta és talán javítani tudják azt az Ossür által jelenleg futtatott modelleken.
L.A.








